
Wir erhalten immer mal wieder Anfragen, ob der RuuviTag zur Überwachung von Vibrationen an rotierenden Maschinen eingesetzt werden kann. Der RuuviTag Pro kann als Bluetooth-Vibrationssensor fungieren, und wir haben eine spezielle Firmware-Version zur Vibrationsmessung entwickelt. Einige unserer Kunden haben bereits Proof-of-Concept-Projekte mit den RuuviTag Pro Sensoren gestartet. Das Sammeln der Vibrationssensordaten erfordert ein individuelles Setup, wie zum Beispiel einen Raspberry Pi, oder die Daten können über das Ruuvi Gateway gesammelt und an einen privaten Server gesendet werden.
Scrolle nach unten, um die spezielle Firmware für die Vibrationsmessung herunterzuladen. Bitte beachte, dass es sich bei der Firmware um eine Beta-Version handelt, die nicht umfassend getestet wurde. Beachte außerdem, dass es eventuell nicht möglich ist, die Standard-Firmware ohne das Ruuvi Development Kit erneut aufzuspielen.
RuuviTag Bluetooth-Vibrationssensor Datenformate
Einfaches Vibrationsdatenformat AC für Bluetooth-Vibrationssensoren
Der RuuviTag kann sowohl einfache als auch komplexe Beschleunigungsmessungen durchführen. Im einfachsten Fall kann die Beschleunigungsmessung nur ein Peak-to-Peak-Wert sein.
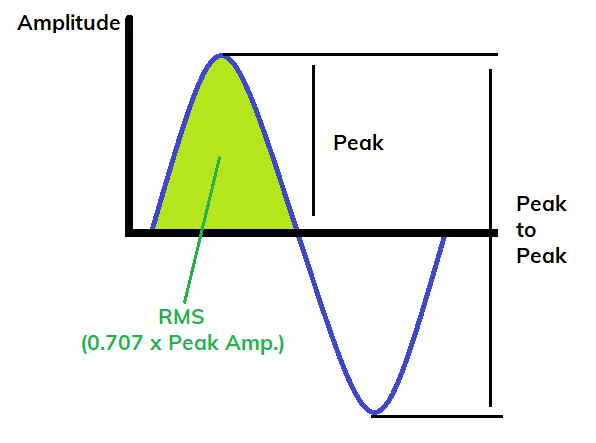
Der Peak-to-Peak-Wert gibt im Wesentlichen an, wie stark die Beschleunigung war, die der Bluetooth-Vibrationssensor registriert hat. Eine weitere einfache Messung ist der Effektivwert (RMS), der aussagt, wie viel Energie die Beschleunigung hat. Da der RuuviTag Pro über einen 3-Achsen-Beschleunigungssensor verfügt, wird für jede Achse ein separater Wert ausgegeben.
RuuviTag Spezial-Vibrations-Firmware Einfaches Datenformat
| Byte | Name | Bereich | Hinweis |
| 0 | HEADER | 0xAC | |
| 1 | VERSION | 0x02 | |
| 2 | P2P_X_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 3 | P2P_X_LSB | Begrenzt durch Beschleunigungsamplitude, 4 – 32 G | |
| 4 | P2P_Y_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 5 | P2P_Y_LSB | Begrenzt durch Beschleunigungsamplitude, 4 – 32 G | |
| 6 | P2P_Z_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 7 | P2P_Z_LSB | Begrenzt durch Beschleunigungsamplitude, 4 – 32 G | |
| 8 | RMS_X_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 9 | RMS_X_LSB | Begrenzt durch Beschleunigungsamplitude, 2 – 16 G | |
| 10 | RMS_Y_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 11 | RMS_Y_LSB | Begrenzt durch Beschleunigungsamplitude, 2 – 16 G | |
| 12 | RMS_Z_MSB | 0 … 32767 | Vorzeichenbehaftet, mG. |
| 13 | RMS_Z_LSB | Begrenzt durch Beschleunigungsamplitude, 2 – 16 G | |
| 14 | RESERVIERT0 | N/A | Für die Zukunft reserviert |
| 15 | RESERVIERT1 | N/A | Für die Zukunft reserviert |
| 16 | RESERVIERT2 | N/A | Für die Zukunft reserviert |
| 17 | RESERVIERT3 | N/A | Für die Zukunft reserviert |
| 18 | RESERVIERT4 | N/A | Für die Zukunft reserviert |
| 19 | RESERVIERT5 | N/A | Für die Zukunft reserviert |
| 20 | SPANNUNG_MSB | 0 … 254 | Berechnung: 1600 mV + 8 * SPANNUNG mV |
| 21 | TEMPERATUR_MSB | -125 … 125 | In Celsius, 1 °C Auflösung |
| 22 | SEQUENZZÄHLER_MSB | 0 … 65534 | Wird bei jeder Messung erhöht, springt nach dem Maximum auf Null zurück |
| 23 | SEQUENZZÄHLER_LSB |
Spezifikation für Datenformat 0xAC Version 2. Bei vorzeichenbehafteten Werten bedeutet der niedrigstmögliche Wert einen Fehler, bei vorzeichenlosen Werten bedeutet der höchstmögliche Wert einen Fehler.
Komplexes Vibrationsdatenformat AF für Bluetooth-Vibrationssensoren
Das Herzstück des RuuviTag Pro ist ein recht leistungsfähiger nRF52832 von Nordic Semiconductor. Er bietet die Möglichkeit, eine Schnelle Fourier-Transformation (FFT) durchzuführen, um die Frequenzkomponenten der Beschleunigung zu berechnen.
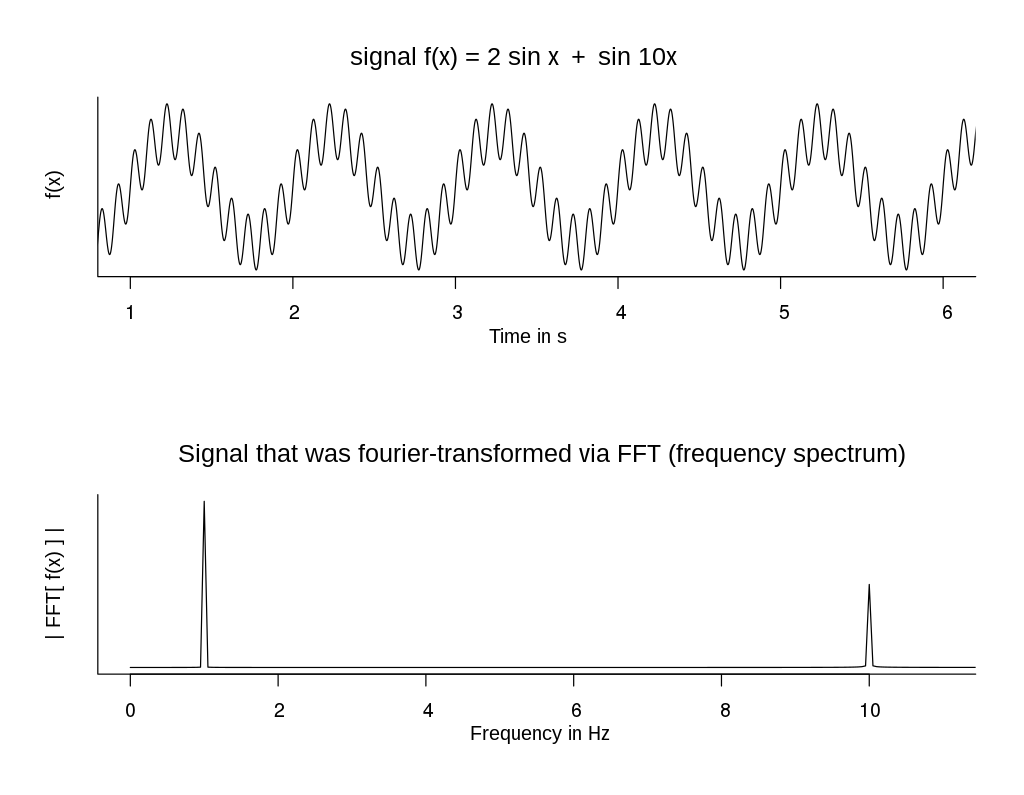
Die Fourier-Transformation kann zwischen den Frequenzen der Beschleunigung unterscheiden, die der RuuviTag Pro misst. Standardmäßig wird die FFT aus 1024 Samples berechnet, die mit 1344 Hz bei 12 Bit und 2 G Amplitude aufgenommen wurden.
Dies ergibt 512 Frequenz-Bins, wobei ein Bin 1344 / 2 / 512 = 1,3 Hz breit ist. Da das Senden jedes einzelnen Bins jedoch nicht praktikabel ist, werden die Bins in 16 Frequenz
-Buckets zusammengefasst und die Leistung des Buckets für die Übertragung berechnet. Dies ergibt eine Ausgabe mit 16 Leistungs-Buckets pro Frequenz.
Da die Skalierung zwischen den Buckets stark variieren kann, ist es nicht sinnvoll, eine feste Skala für Frequenzdaten zu verwenden. Stattdessen wird die Beschleunigung auf den höchsten Wert normiert und der Rest der Werte entsprechend skaliert. Die Skalierungsinformationen werden in der Übertragung mitgesendet.
Erfahre mehr über die FFT auf Wikipedia https://de.wikipedia.org/wiki/Schnelle_Fourier-Transformation
RuuviTag Spezial-Vibrations-Firmware Komplexes Datenformat
Ein Beispiel für die Dekodierung der Vibrationssensordaten findest du unter https://github.com/ojousima/ojousima.ruuvi_endpoints.ts/blob/master/src/ojousima_endpoint_af.ts
| Byte | Name | Bereich | Hinweis |
| 0 | HEADER | 0xAF | |
| 1 | VERSION | 0x01 | |
| 2 | TYP | 0 … 2 | 0 – X-Achse, 1 – Y-Achse, 2 – Z-Achse |
| 3 | SKALA_MSB | 0 … 255 | 8.8 Festkommawert |
| 4 | SKALA_LSB | Teile den Wert durch 256, um einen Skalierungs-Float zu erhalten | |
| 5 | FREQ_MSB | 0 … 65534 | Höchstes Frequenz-Bucket. |
| 6 | FREQ_LSB | Durch Beschleunigungssensor auf ~5 kHz begrenzt. In Hz. | |
| 7 | BUCKET_1 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 8 | BUCKET_2 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 9 | BUCKET_3 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 10 | BUCKET_4 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 11 | BUCKET_5 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 12 | BUCKET_6 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 13 | BUCKET_7 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 14 | BUCKET_8 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 15 | BUCKET_9 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 16 | BUCKET_10 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 17 | BUCKET_11 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 18 | BUCKET_12 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 19 | BUCKET_13 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 20 | BUCKET_14 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 21 | BUCKET_15 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 22 | BUCKET_16 | 0 … 255 | Durch Skala teilen, um den Originalwert in G(rms)²/Hz zu erhalten |
| 23 | SEQUENZ | 0.254 | Springt auf 0 zurück, wird bei jeder Messung um eins erhöht |
RuuviTag Pro Bluetooth-Vibrationssensor Firmware
Wir haben eine Proof-of-Concept-Firmware erstellt, die in den oben genannten Formaten und im ursprünglichen Ruuvi RAWv2 (0x05) Format sendet. Du kannst sie herunterladen und auf jedem RuuviTag oder RuuviTag Pro bis zur Hardware-Version B8 ausführen. Die spezielle Firmware kann hier heruntergeladen werden: https://github.com/ojousima/ojousima.acceleration_bcast.c/releases/tag/v1.0.3. Das Flashen kann mit Nordic Semiconductor nRF Connect durchgeführt werden, eine Anleitung findest du hier.
Die Firmware sendet in einem Ein-Minuten-Zyklus, wobei jeder Zyklus 5 verschiedene Übertragungen umfasst:
- Original RAWv2
- „Einfaches“ Vibrationsdatenformat AC
- „Komplexes“ Vibrationsdatenformat AF, einmal pro Achse
Jede Übertragung wird 5-mal im Abstand von 1285 ms wiederholt, sodass der Ein-Minuten-Zyklus etwa 32 Sekunden Sendezeit und eine weitere halbe Minute Ruhezeit hat. Alle Messungen stammen aus derselben Beschleunigungsstichprobe.





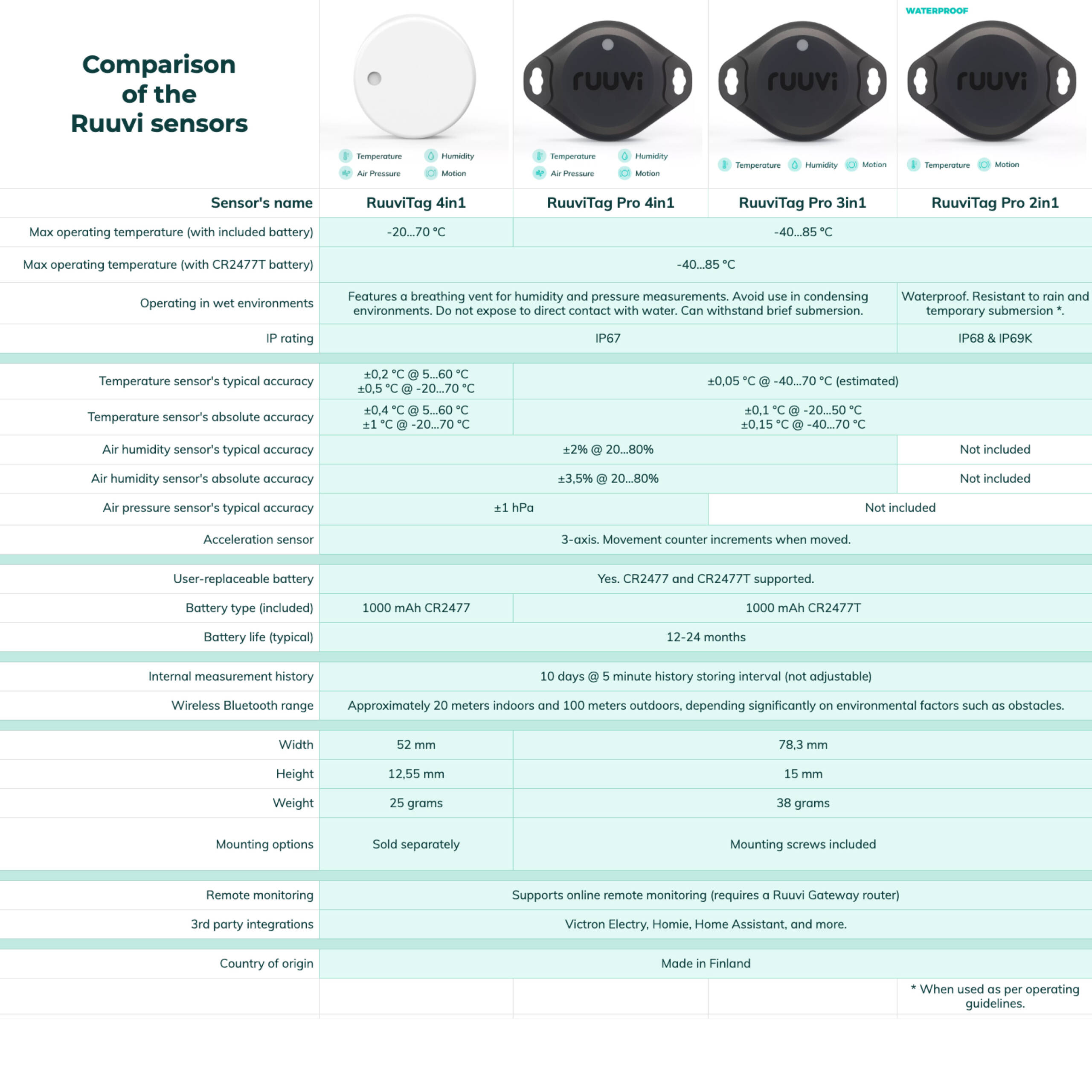
RuuviTag Pro Bluetooth-Sensor
Teste Ruuvis Beta-Firmware für die Vibrationsmessung
RuuviTag Pro Sensor
| 5 Sterne | 0% | |
| 4 Sterne | 0% | |
| 3 Sterne | 0% | |
| 2 Sterne | 0% | |
| 1 Stern | 0% |
Leider stimmen keine Bewertungen mit deiner aktuellen Auswahl überein
Versand
Füge mehr hinzu für kostenlosen Versand!
Expressversand verfügbar
FAQ
Kann der RuuviTag Pro als Vibrationssensor verwendet werden?
Ja, es ist möglich, den RuuviTag Pro Bluetooth-Sensor mit einer speziellen Proof-of-Concept-Firmware als Vibrationssensor zu nutzen.
Was sind die typischen Anwendungsfälle für Bluetooth-Vibrationssensoren?
- Feststellen, ob eine Maschine ein- oder ausgeschaltet ist
- Analyse von Vibrationssensordaten für die vorausschauende Wartung (Predictive Maintenance)